An assistive picking
system that does
the heavy lifting.
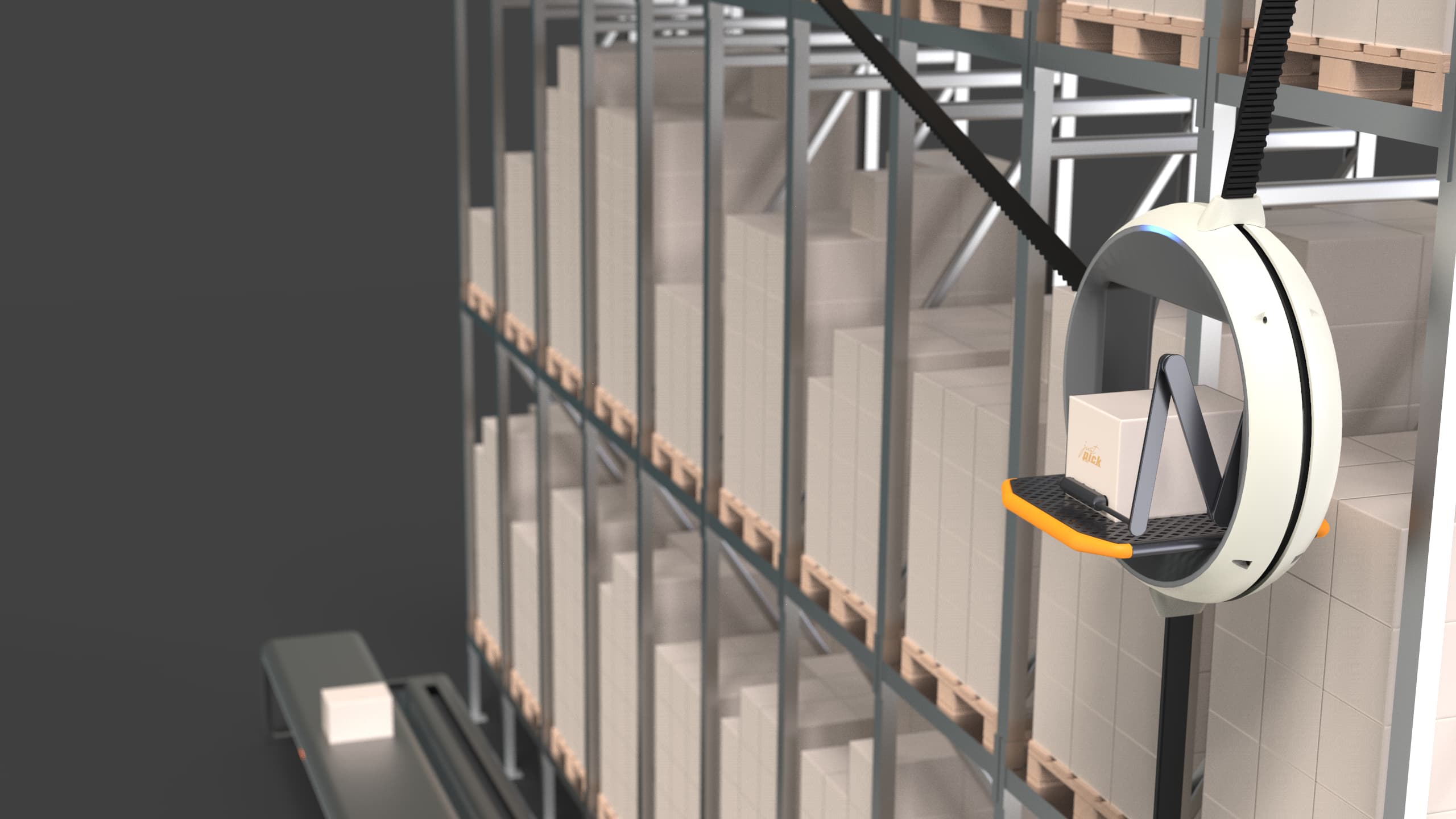
Just Pick is an assistive order picking system for warehouses — a cable-suspended robot that retrieves items from shelf positions and presents them at ergonomic height, so human pickers can collect their orders without bending, reaching or lifting from the floor. Developed in cooperation with Crown Equipment.
Role
Industrial Designer
Single Project
Focus
Product Design,
Mechatronics & Prototyping
Awards
IF Design Talent Award 2020
Research
A day in the
Hofer warehouse.
The project started with a detailed briefing from Crown Equipment, followed by a field visit to a Hofer distribution warehouse. I spent an afternoon observing pickers at work, then returned to conduct structured interviews. The patterns that emerged — about posture, pace, fatigue and pride in the work — directly shaped everything that followed.

The problem
1,500 picks a day.
5,000 kg lifted.
Order picking is one of the most physically demanding jobs in logistics. Workers crouch, reach overhead and lift from floor level repeatedly — all day, every day. Bad ergonomics are the leading cause of work-related illness in the industry, and only a narrow band of shelf positions sits at a genuinely comfortable working height. The rest of the shelf is a problem.
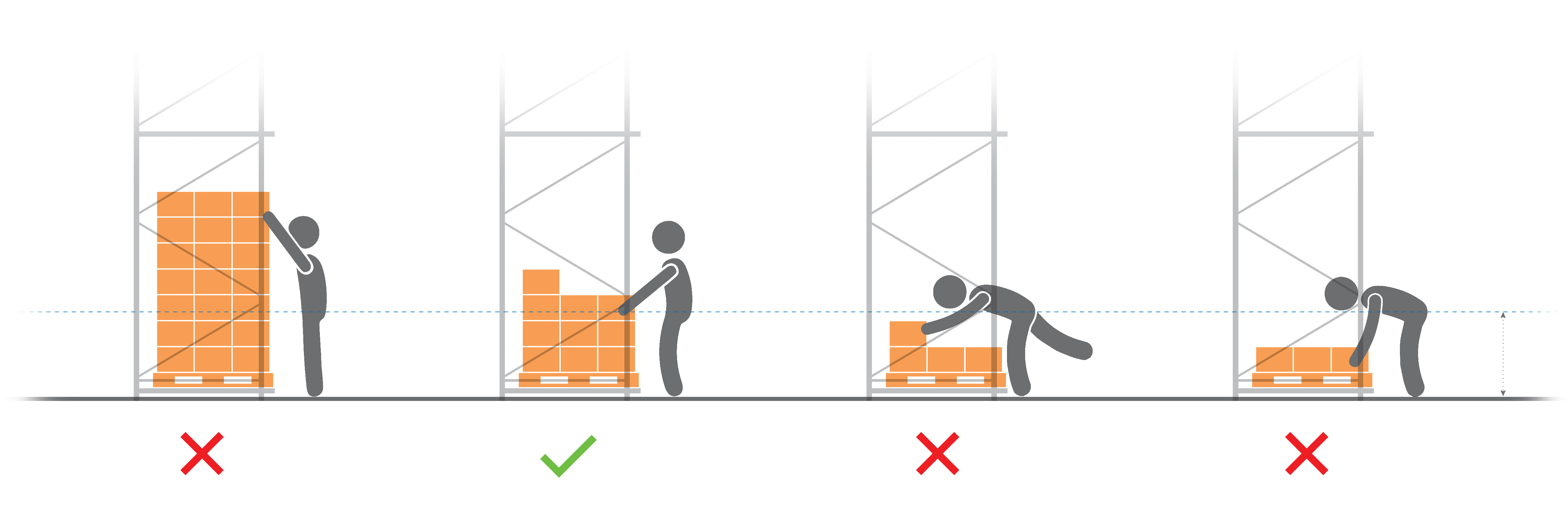
The ideal lifting height is around 75 cm. In a typical warehouse shelf, only a handful of positions ever reach that zone — the rest demand constant compromise.
Analysis
Five problems.
Five best solutions.
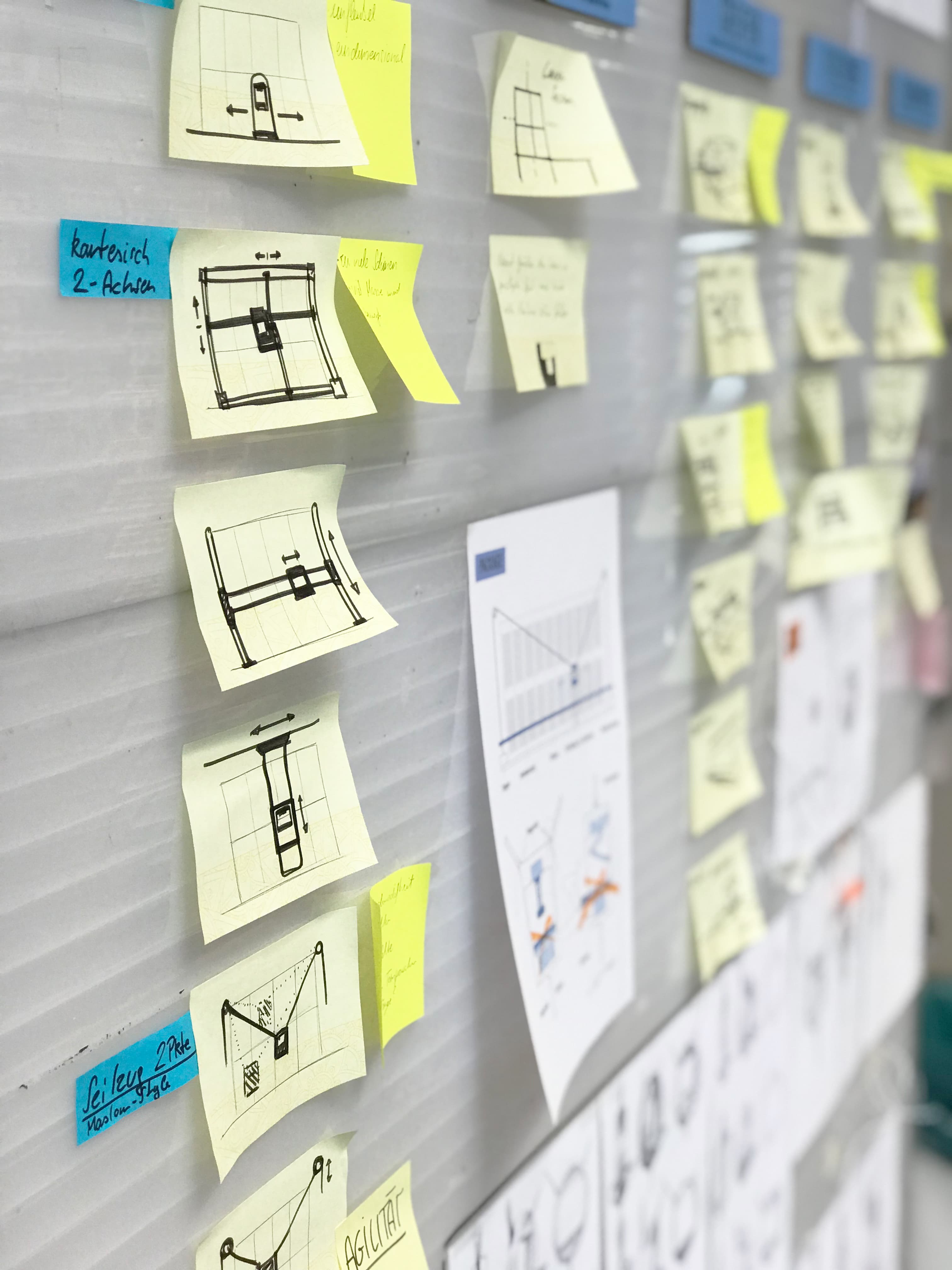
I broke the picking system into five independent design requirements — movement, recognition, gripping, cargo security and collection — and evaluated solutions for each separately. This kept the decisions clean: a polargraph suspension for movement, laser scanning for recognition, a vacuum suction arm for gripping, a grappler for security, and a colour-coded LED table for collection.
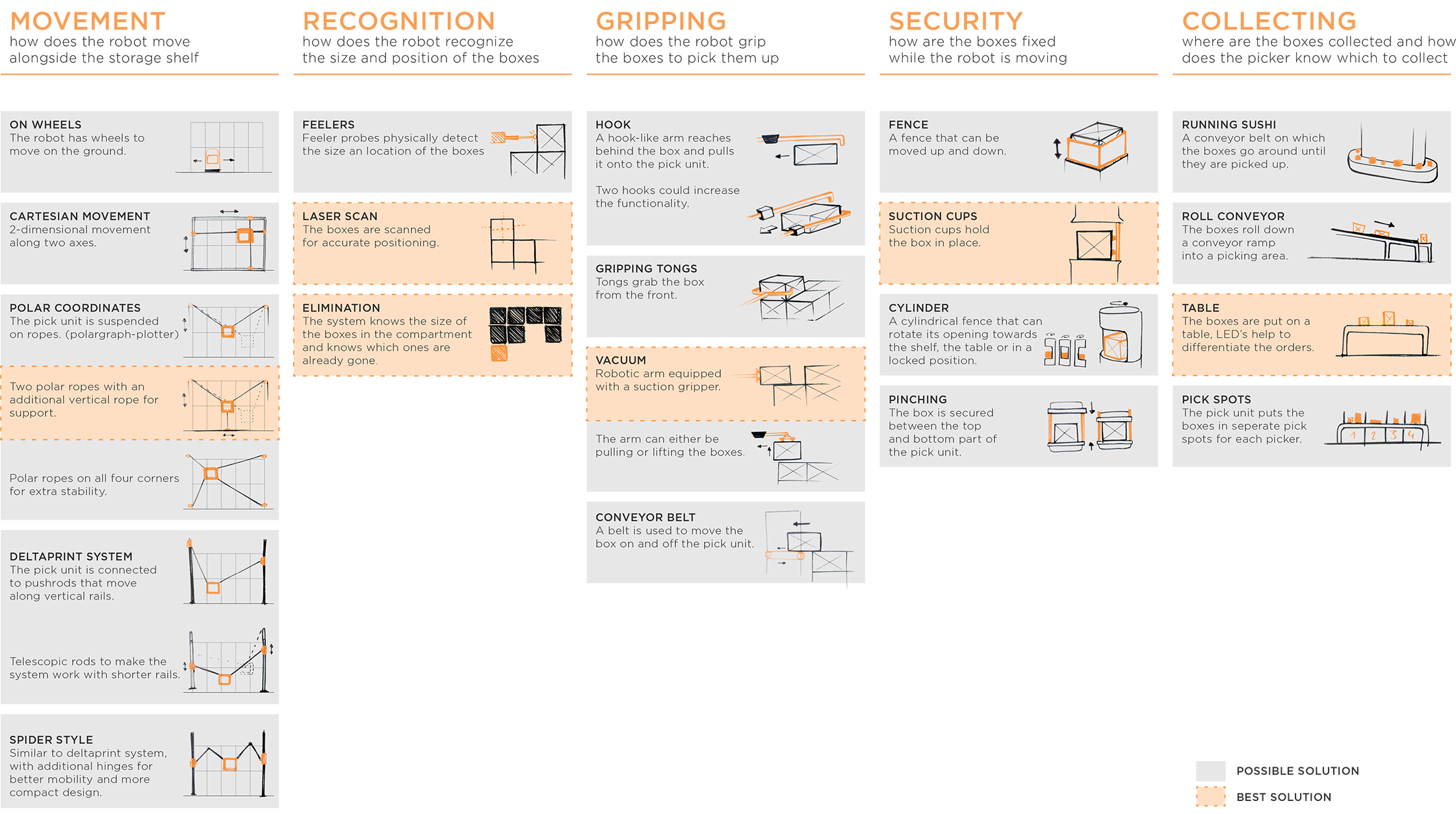
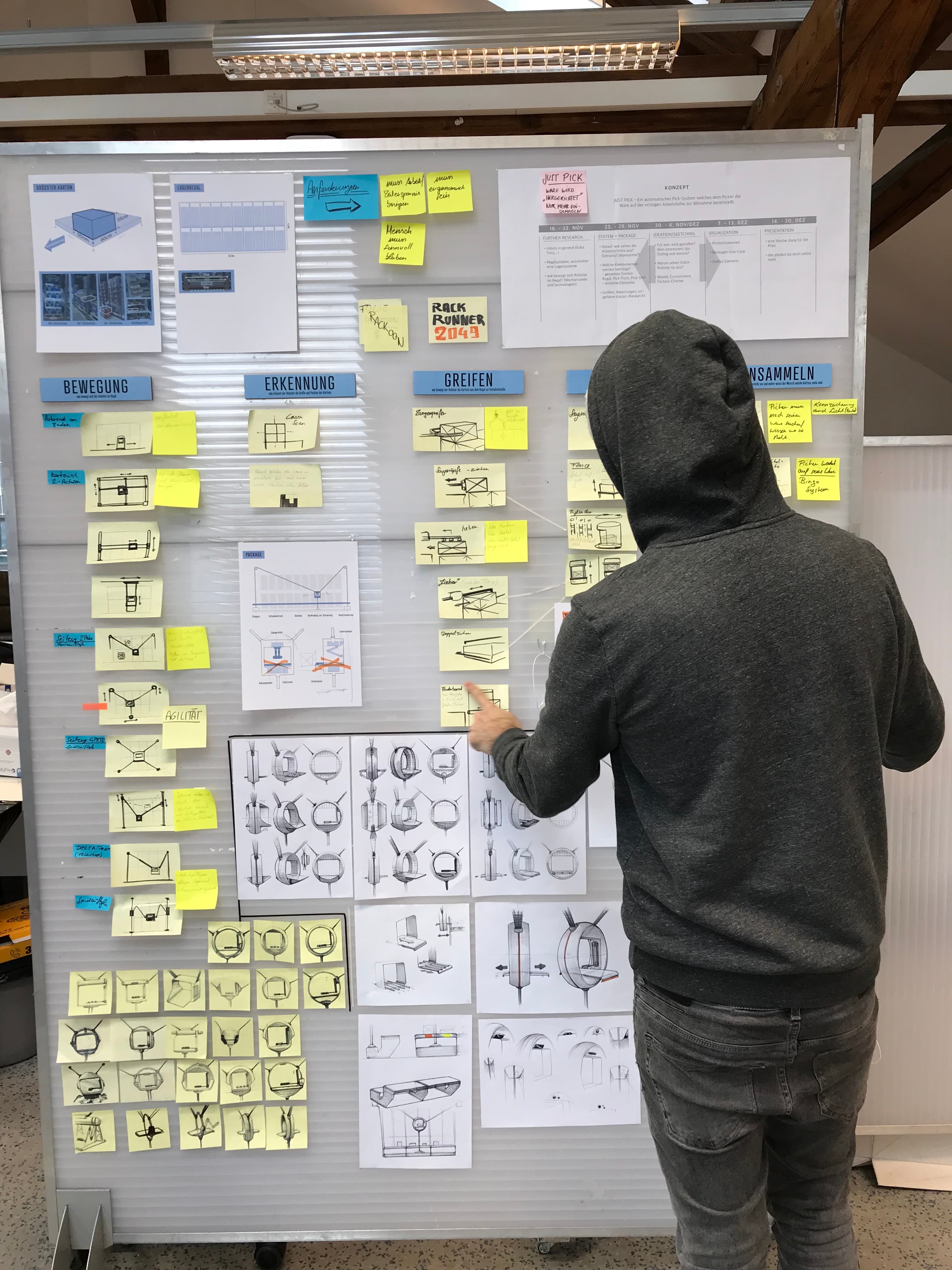
Every sub-problem was solved independently — then the best answers were assembled into a single coherent system. No compromises forced by entangled decisions.
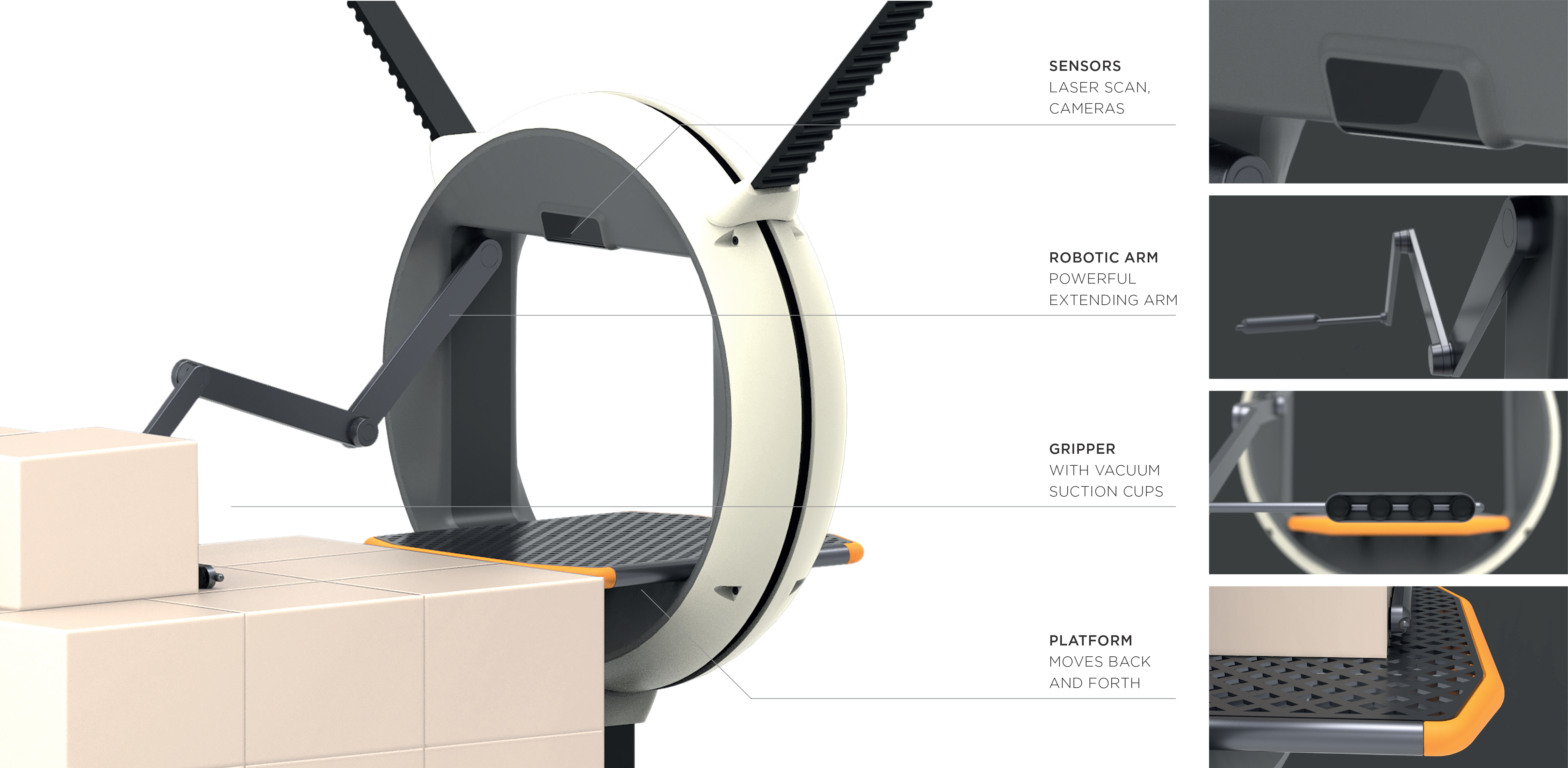
Concept
Suspended by ropes.
Positioned by stepper motors.
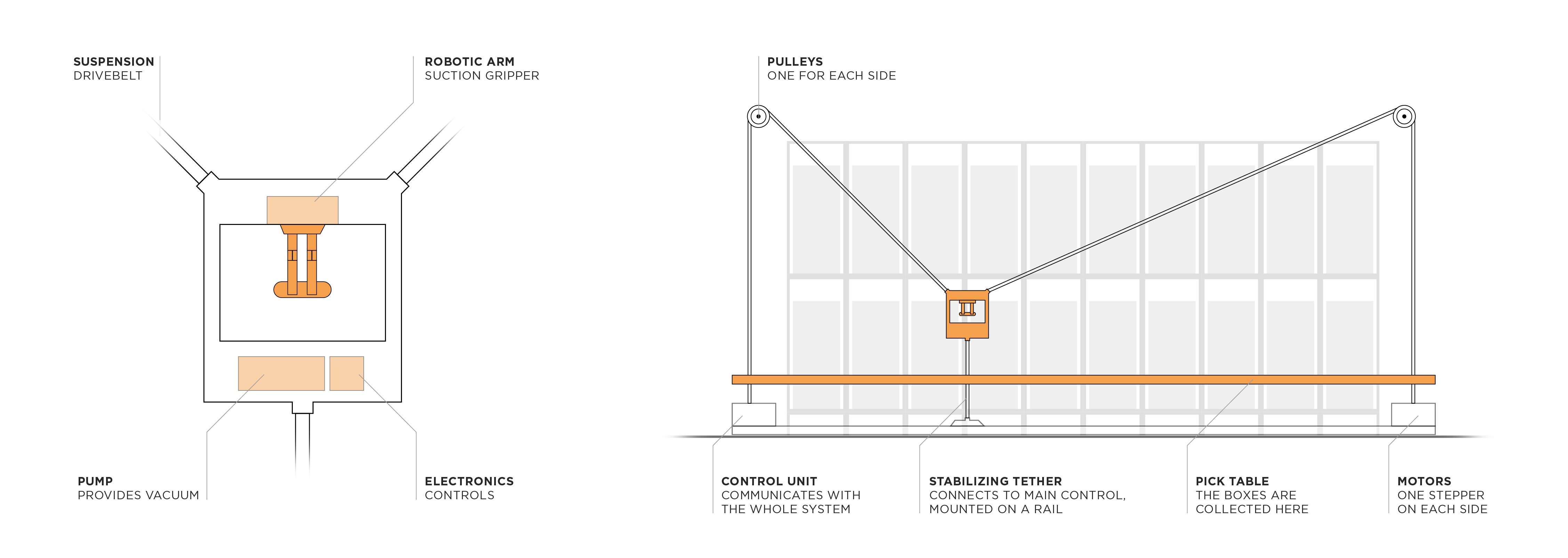
The core idea is a polargraph system — the pick unit hangs on two ropes routed through pulleys at the top corners of each shelf. By adjusting rope lengths independently with stepper motors, the unit can reach any shelf position precisely. A robotic arm with a vacuum suction cup retrieves the box, a grappler holds it securely during movement, and the box is deposited onto a pick table at 75 cm — always at ergonomic height, always ready to collect.
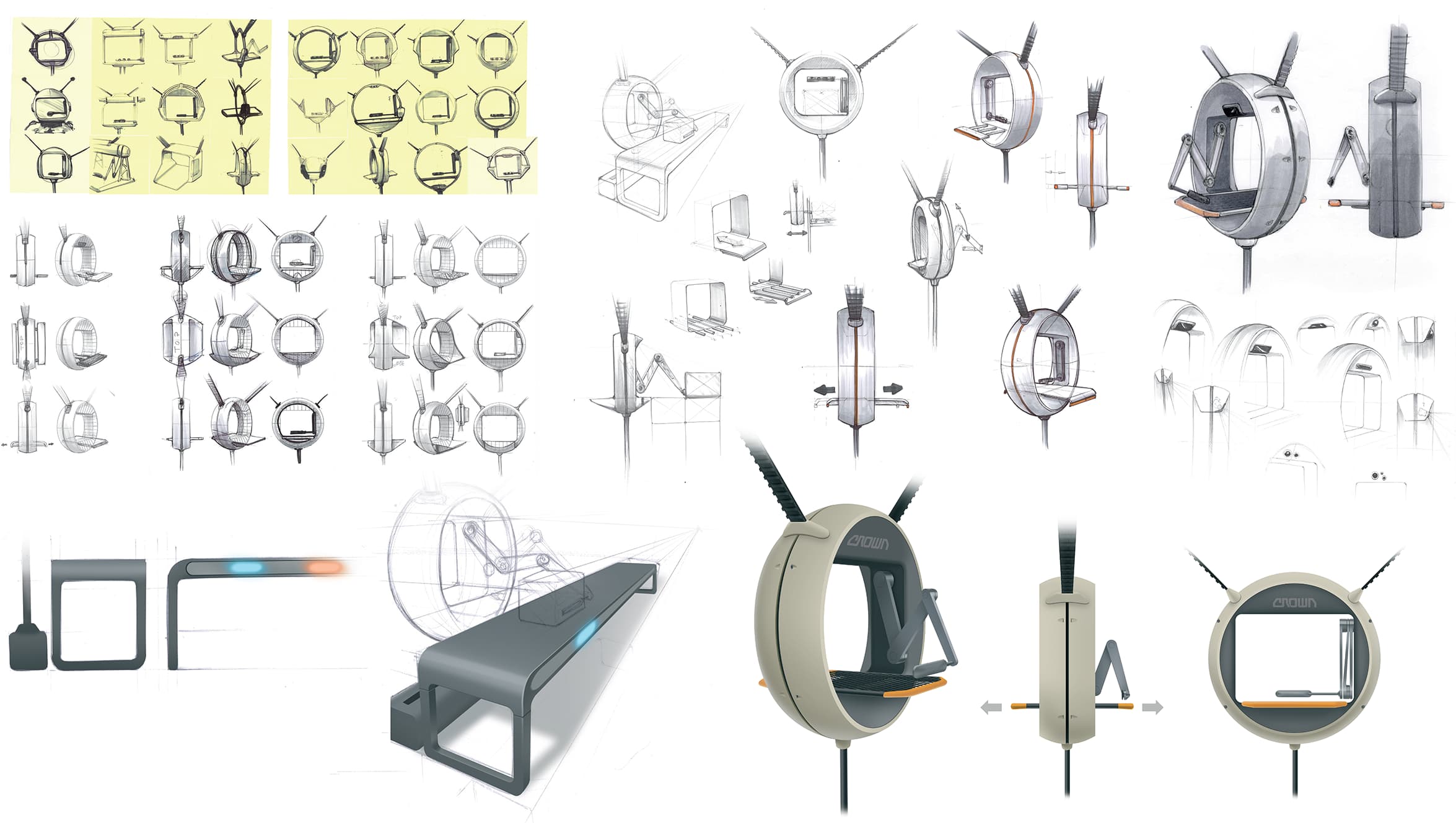
Mock-ups
String, wire and
Lego Technic.
Before committing to a direction, I built quick physical models to test two suspension geometries. A three-pivot design caused the platform to slope under load — ruled out. A circular ring design kept the platform self-levelling. The robotic arm was prototyped in Lego Technic to explore reach, segment count and mounting positions across the shelf volume.
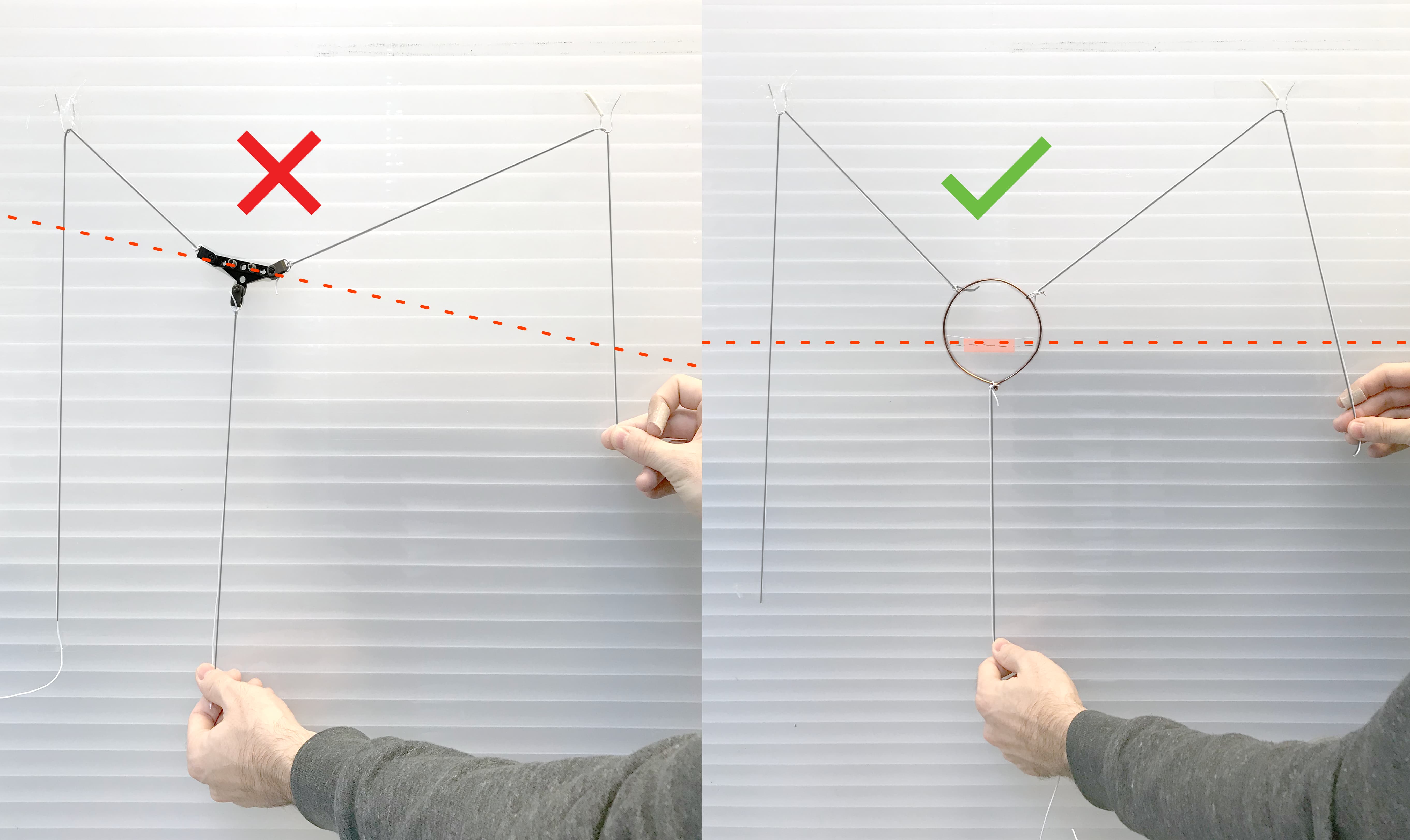
Circular shape keeps platform horizontal.
Testing arm kinematics.
Prototype
Built and running
in Mechatronics class.
Together with a classmate, I built a working scaled prototype of the polargraph drive system during the Mechatronics module. An Arduino Uno with an Adafruit MotorShield drives two NEMA 17 stepper motors — one per side — controlling two GT2 belt loops. A simple laptop interface lets you click on a shelf compartment and the pick unit moves to it. It moves. It positions accurately. The concept works.
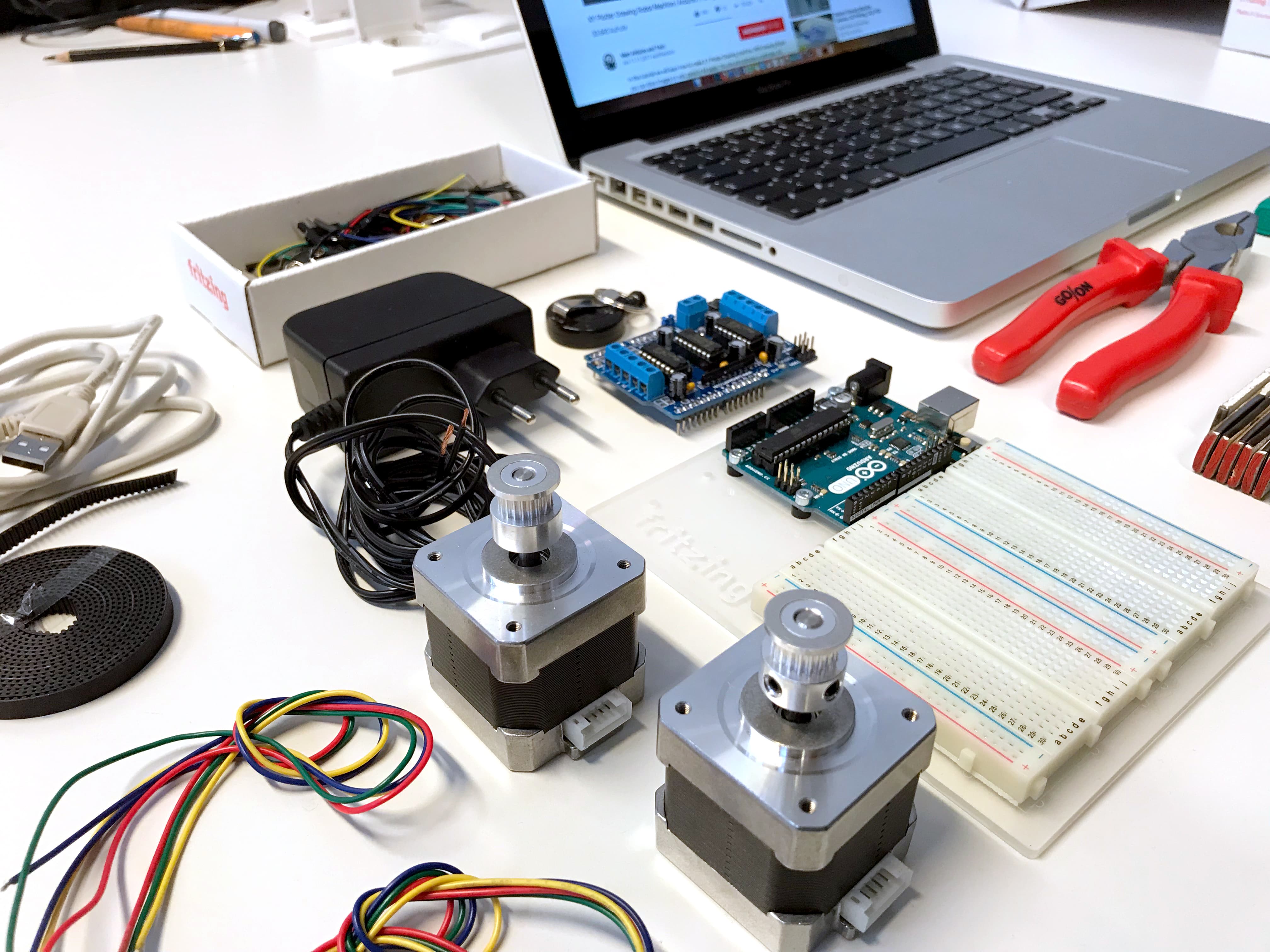
Components: Arduino Uno, Adafruit MotorShield, 2× NEMA 17 stepper motors, 2 m GT2 drive belt, 2× GT2 pulleys (20 teeth), 5V USB power supply.
Design development
The shape follows
the mechanism.
The circular suspension ring became the central design motif. I studied Crown's existing product language — flowing forms, split-lines, a restrained industrial palette — and used that as a filter. Dozens of thumbnail explorations narrowed to a clear direction: a toroidal ring housing that communicates the mechanism honestly, with Crown's signature warm-grey body and an orange accent seam.
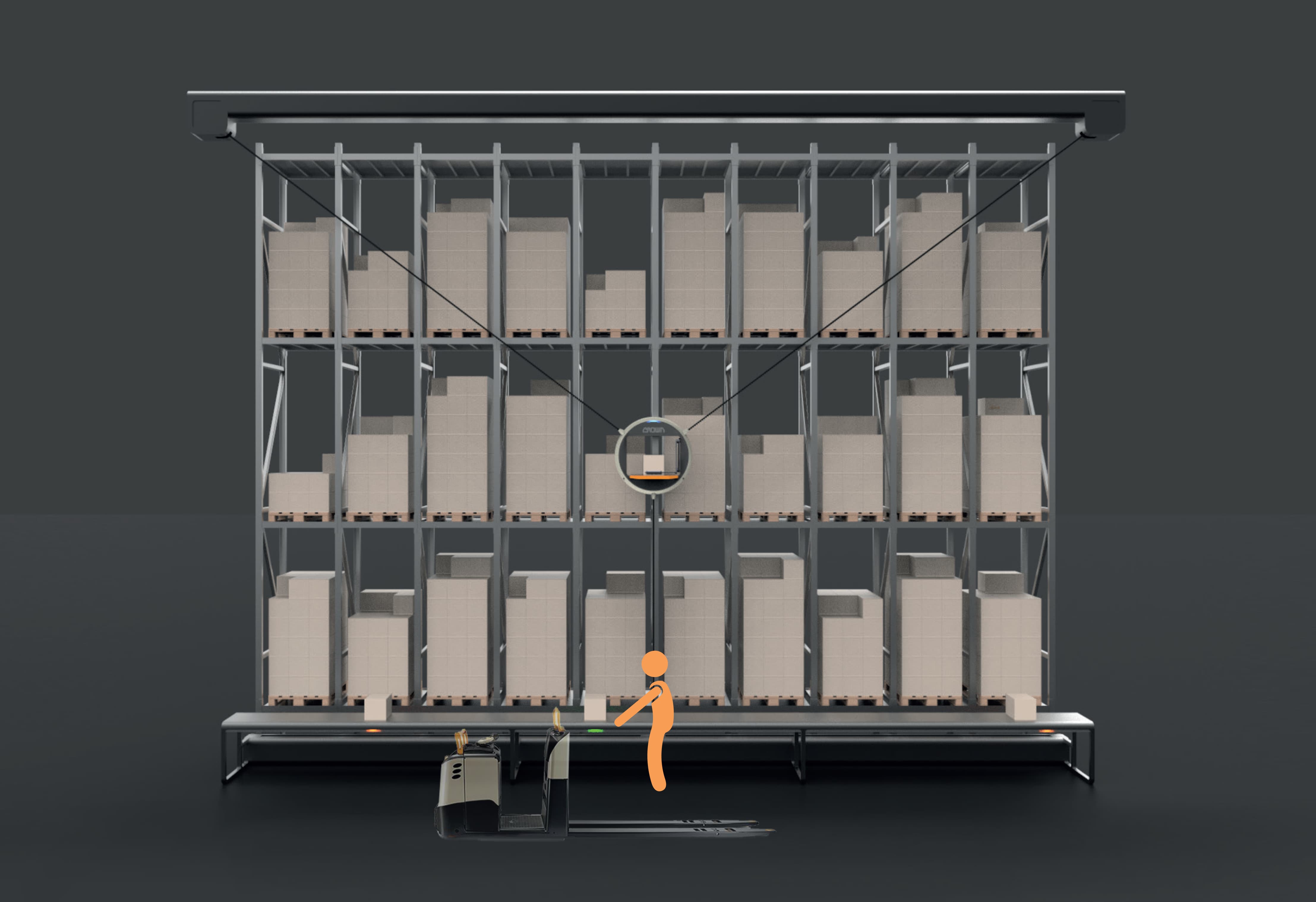
Use case
One system for the
whole warehouse.
Each shelf in the warehouse gets its own pick unit — motors, controls and pick table included — connected to a central warehouse management system. When a picker's order list is uploaded, the unit starts preparing items before the picker even arrives. Items are colour-coded by picker. Walk up, collect, move on. The human stays in the loop; the robot handles the ergonomically costly part.
Just Pick significantly improves ergonomics and reduces work-related illness — while the high pace of the autonomous unit speeds up throughput without removing the picker from the process.

Just Pick was developed over two months as a 5th-semester single project at FH JOANNEUM in cooperation with Crown Equipment.